test bed for aerosol drug delivery to neonates.
Demcon’s task in project MDOT is to develop…
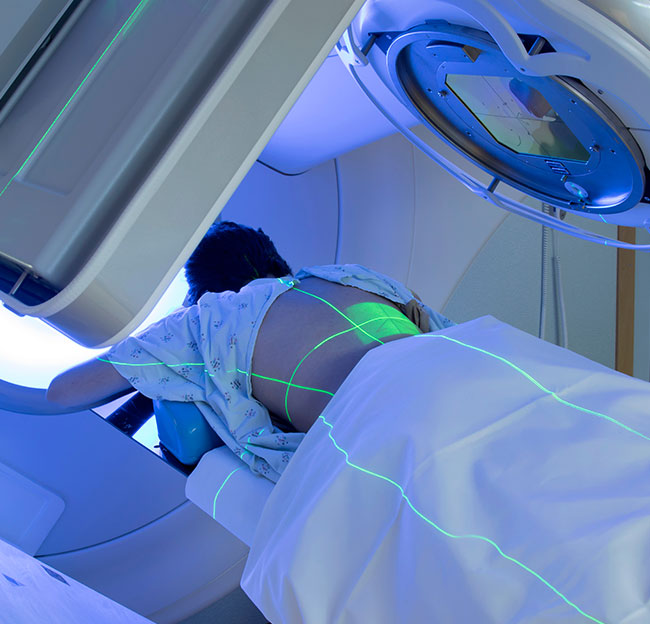
Read MoreWe developed a MRI compatible Needle Positioning System which can be used to take biopsies when prostate cancer is suspected. In the current procedure, the doctor inserts the needle manually through the rectum. On average, four attempts are needed before the needle reaches the right position. Additionally, the patient is given preventive antibiotics because of the risk of infection. With our robot, the needle can be positioned accurately in one insertion through the external skin (so no antibiotics is needed). This makes the procedure faster, more accurate, more sterile and more patient-friendly.
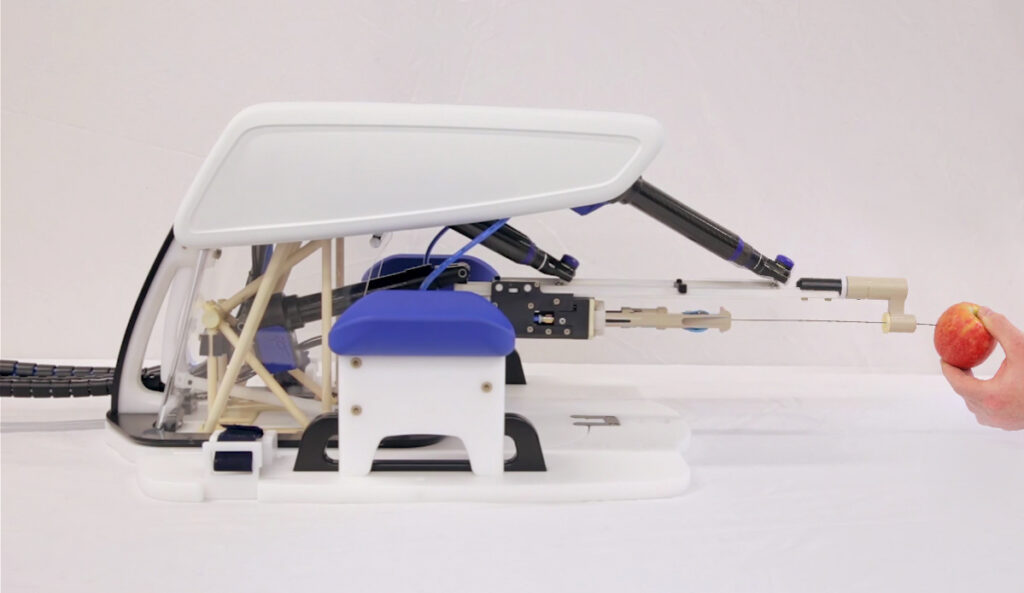
For the system concept a so-called Stewart platform (familiar in movement simulators) was chosen, which hangs suspended from an upper plate by five activated arms. The movements of these five arms are controlled by a system of ball and socket and line joints, threaded spindles and piezoelectric motors. An extensive mechanical tolerance analysis established the foundation for a very meticulous construction.
A significant design challenge was the MRI environment. The various robot components could not be allowed to influence the quality of the MRI images, and thus the magnetic field. This required the use of high-end MRI-compatible materials. Wherever there were any doubts, we were able to test on a manikin in the Radboudumc. The arms of the Stewart platform are manufactured in carbon, and synthetic screws (by PEEK) turned out to hold the construction together reliably. Ceramic was used in bearings and on the treads of the piezoelectric motors for sufficient accuracy and rigidity.
Other design requirements involved ergonomics, sterility and appearance. The construction was chosen in such a way that patients of different sizes could adopt a comfortable position, and that there would always be sufficient space to introduce the needle. The design also took account of cleaning the system and easily being able to sterilise the parts which come in contact with the patient. The industrial design produced a high-quality appearance. Thus both the doctor and the patient can be assured of the quality of MIRIAM.

This project was a fine combination of a healthcare demand and a high-tech solution. An MRI is expensive to use, and this system halves the duration of the procedure. So not only does it improve the healthcare quality, but it also makes it more affordable. We have delivered the prototype to the UT for follow-up research on the interaction between the needle and the tissue, among other things. This was a one-off, where we attained the hard specs involving accuracy, and demonstrated its feasibility. Thus this prototype has an entirely feasible sterility concept. We also devoted a great deal of attention to the industrial design, which gave the system a ‘soft’ appearance to put the patient at ease.
What is unique is that we were able to elaborate a concept which is simple and can achieve the desired movement with more than enough rigidity and accuracy. We were able to integrate many features in several parts to be able to achieve this in the limited space. Together with suppliers, we invested a great deal of energy in finding the right MRI-compatible materials. The result is that we have been able to combine exceptional materials in this application.